概率机器人第四章习题解答
第四章
1.在本习题中,请对前面章节研究的线性动态系统进行一个直方图滤波实现。
(1)对这本书第3章习题1所描述的动态系统进行直方图滤波实现。利用滤波为时刻$t(t=1,2,\cdot,5)$的每个值预测后验分布。绘制关于$x$和$x^{'}$的联合后验,这里$x$为横轴,$x^{'}$为纵轴。
(引用3.1)在本题及下面的练习中,请为一个简单的动态系统——在线性环境中按线性动态运动的汽车,设计一个卡尔曼滤波。为了简单起见,假定$\Delta t = 1$。t时刻汽车的位置由$x_t$给定。其速度为$\dot{x}_t$,加速度为$\ddot{x}_t$;符合均值为0,协方差为$\sigma^2=1$的高斯分布,假定可以任意设定每个时间点的加速度。
离散贝叶斯滤波:
$
Algorithm~Discrete\_Bayes\_filter({p_{k,t-1}},u_t,z_t):$
$for~all~k~do$
$\bar{p}_{k,t}=\sum_i p(X_t=x_k|u_t,X_{t-1}=x_i) p_{i,t-1}$
$p_{k,t}=\eta p(z_t|X_t=x_k)\bar{p}_{k,t}$
$endfor$
$return~\{p_{k,t}\}$
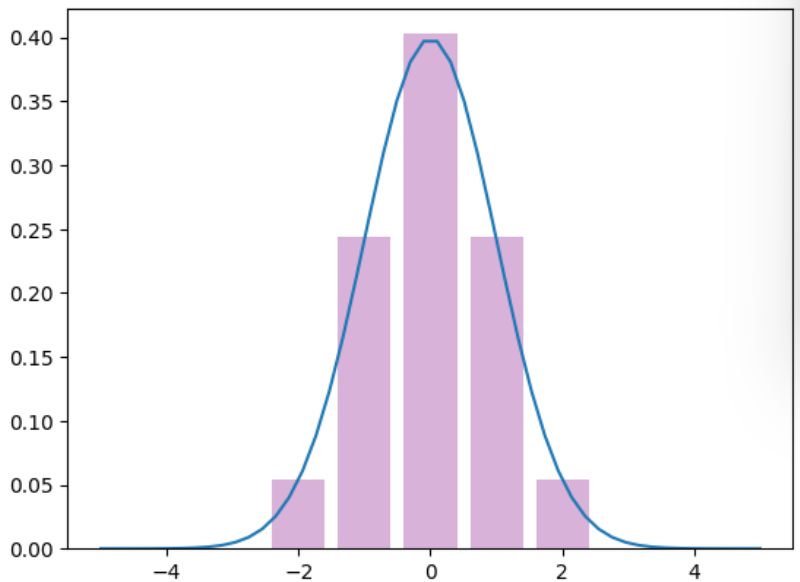
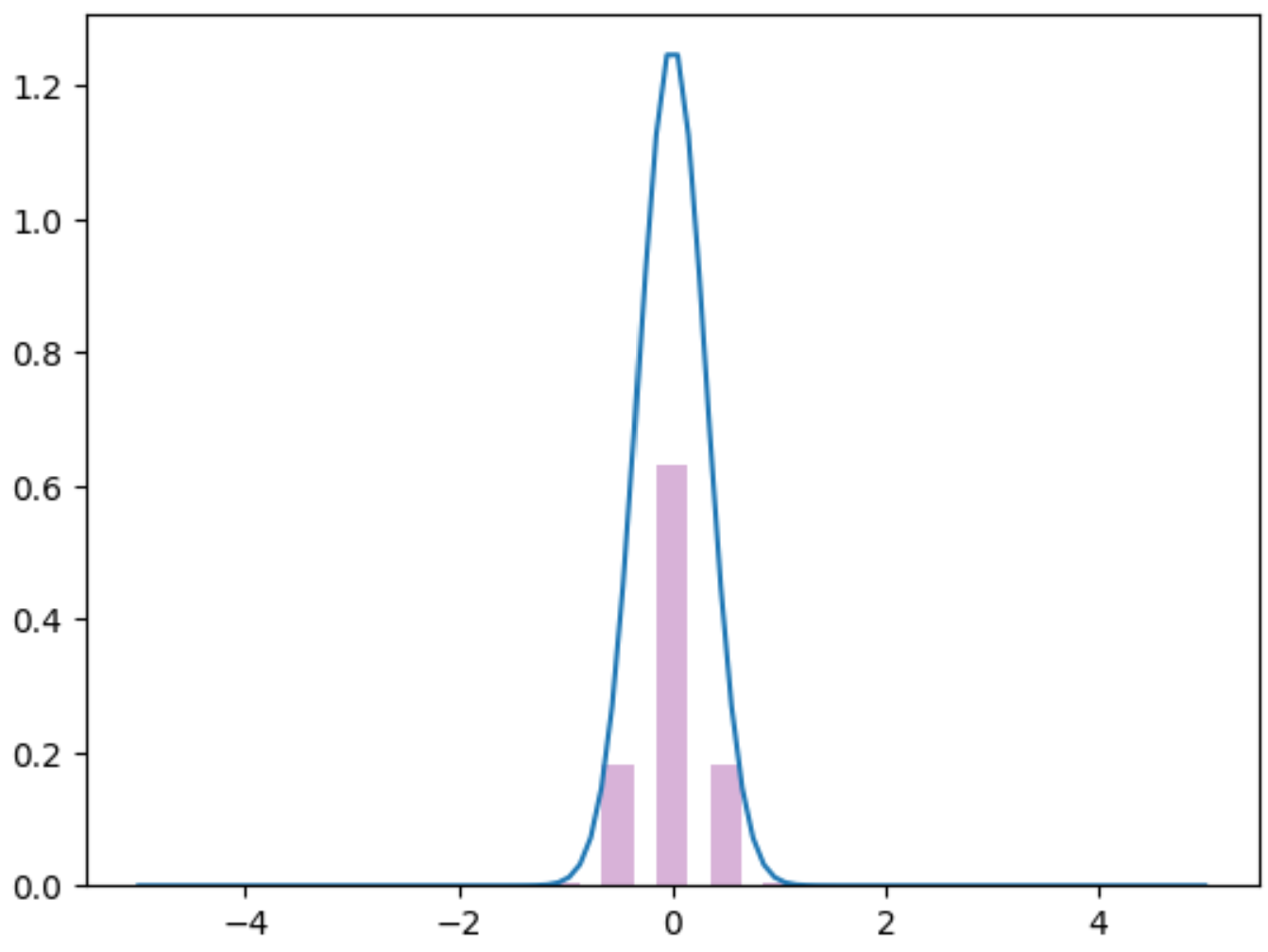
加速度符合均值为0,协方差为1的高斯分布。
$p(x)=(2\pi\sigma^2)^{-\frac{1}{2}} exp\{-\frac{1}{2} \frac{(x-\mu)^2}{\sigma^2}\}
=\frac{e^{-\frac{1}{2}x^2}}{\sqrt{2\pi}}$
对该函数采样:
import matplotlib.pyplot as plt
import numpy as np
import math
a = np.linspace(-5, 5, 50)
pa = np.exp(-1/2*a*a)/np.sqrt(2*np.pi)
plt.plot(a,pa)
#采样
xx = np.linspace(-2, 2, 5)
pxx = np.exp(-1/2*xx*xx)/np.sqrt(2*np.pi)
#归一化
pxx_sum = 1/np.sum(pxx)
pxx = np.dot(pxx_sum,pxx)
plt.bar(xx,pxx,color='purple',alpha=0.3)
print(pxx)
plt.show()得到概率分布:
| a | -2 | -1 | 0 | 1 | 2 |
| p(a) | 0.05448868 | 0.24420134 | 0.40261995 | 0.24420134 | 0.05448868 |
$v$的概率分布:
$t=1$时:
$pv[1]=\begin{pmatrix}0.05448868 & 0.24420134 & 0.40261995 & 0.24420134 & 0.05448868\end{pmatrix}$
$t=2$时:
$pv[2][-4]=pv[1][-2]pa[-2]$
$pv[2][-3]=pv[1][-2]pa[-1]+pv[1][-1]pa[-2]$
$pv[2][-2]=pv[1][-2]pa[0]+pv[1][-1]pa[-1]+pv[1][0]pa[-2]$
$pv[2][-1]=pv[1][-2]pa[1]+pv[1][-1]pa[0]+pv[1][0]pa[-1]+pv[1][2]pa[-2]$
$pv[2][0]=pv[1][-2]pa[2]+pv[1][-1]pa[1]+pv[1][0]pa[0]+pv[1][3]pa[-1]+pv[1][4]pa[-2]$
其余部分概率分布与上述部分对称。
只选择-2到2的区间进行迭代。
import matplotlib.pyplot as plt
import numpy as np
import math
p=np.array([[0.05448868,0.24420134,0.40261995,0.24420134,0.05448868],\
[0,0,0,0,0],\
[0,0,0,0,0],\
[0,0,0,0,0],\
[0,0,0,0,0]])
pa=np.array([0.05448868,0.24420134,0.40261995,0.24420134,0.05448868,0,0,0,0,0,0,0,0,0])
for t in range(1,5):
p[t][0]=p[t-1][0]*pa[2]+p[t-1][5]*pa[1]+p[t-1][6]*pa[0]
p[t][7]=p[t-1][0]*pa[3]+p[t-1][8]*pa[2]+p[t-1][9]*pa[1]+p[t-1][10]*pa[0]
p[t][11]=p[t-1][0]*pa[4]+p[t-1][12]*pa[3]+p[t-1][13]*pa[2]+p[t-1][14]*pa[1]+p[t-1][15]*pa[0]
p[t][16]=p[t][17]
p[t][18]=p[t][0]
psum=0
for i in range(0,5):
psum=psum+p[t][i]
for i in range(0,5):
p[t][i]=1/psum*p[t][i]
#print(p[t][i])
plt.bar(xx,p[t],color='purple',alpha=0.3)
plt.show()
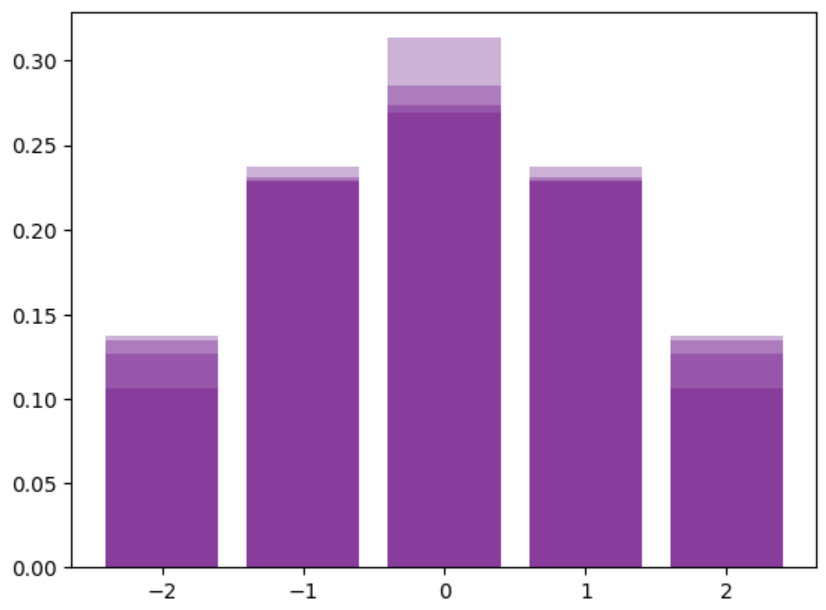
print(p)直方图如图所示,所得概率矩阵为:
| v=-2 | v=-1 | v=0 | v=1 | v=2 | |
|---|---|---|---|---|---|
| t=1 | 0.05448868 | 0.24420134 | 0.40261995 | 0.24420134 | 0.05448868 |
| t=2 | 0.10593992 | 0.23732692 | 0.31346633 | 0.23732692 | 0.10593992 |
| t=3 | 0.12648582 | 0.23112599 | 0.28477638 | 0.23112599 | 0.12648582 |
| t=4 | 0.13448707 | 0.22873842 | 0.27354903 | 0.22873842 | 0.13448707 |
| t=5 | 0.13768919 | 0.22778266 | 0.26905629 | 0.22778266 | 0.13768919 |
对于$x$:
px=np.array([[0.05448868,0.24420134,0.40261995,0.24420134,0.05448868],\
[0,0,0,0,0],\
[0,0,0,0,0],\
[0,0,0,0,0],\
[0,0,0,0,0]])
for t in range(1,5):
px[t][0]=px[t-1][0]*p[t][20]+px[t-1][21]*p[t][22]+px[t-1][23]*p[t][0]
px[t][24]=px[t-1][0]*p[t][25]+px[t-1][26]*p[t][27]+px[t-1][28]*p[t][29]+px[t-1][30]*p[t][0]
px[t][31]=px[t-1][0]*p[t][32]+px[t-1][33]*p[t][34]+px[t-1][35]*p[t][36]+px[t-1][37]*p[t][38]+px[t-1][39]*p[t][0]
px[t][40]=px[t][41]
px[t][42]=px[t][0]
pxsum=0
for i in range(0,5):
pxsum=pxsum+px[t][i]
for i in range(0,5):
px[t][i]=1/pxsum*px[t][i]
#print(p[t][i])
plt.bar(xx,px[t],color='purple',alpha=0.3)
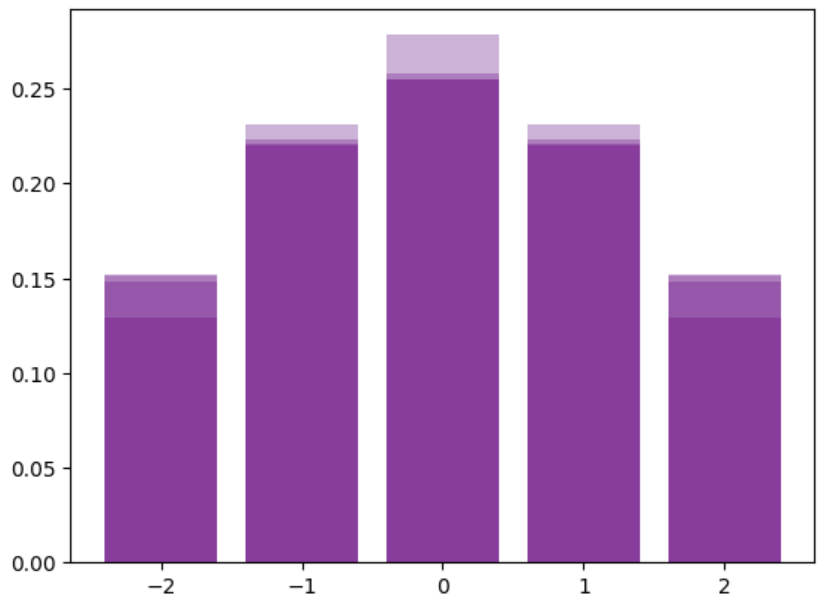
print(px)直方图如图所示,概率矩阵为:
| x=-2 | x=-1 | x=0 | x=1 | x=2 | |
|---|---|---|---|---|---|
| t=1 | 0.05448868 | 0.24420134 | 0.40261995 | 0.24420134 | 0.05448868 |
| t=2 | 0.12920832 | 0.231546 | 0.27849136 | 0.231546 | 0.12920832 |
| t=3 | 0.14786234 | 0.22314876 | 0.2579778 | 0.22314876 | 0.14786234 |
| t=4 | 0.15156189 | 0.22086468 | 0.25514688 | 0.22086468 | 0.15156189 |
| t=5 | 0.15236539 | 0.22027755 | 0.25471414 | 0.22027755 | 0.15236539 |
(2)在直方图滤波中,如本书第3章的习题2所描述的测量更新步骤,假定在时刻$t=5$,观测到一个测量$z=5$。在更新直方图滤波之前和之后说明和绘制后验。
$Algorithm~Discrete\_Bayes\_filter({p_{k,t-1}},u_t,z_t):$
$for~all~k~do$
$\bar{p}_{k,t}=\sum_i p(X_t=x_k|u_t,X_{t-1}=x_i) p_{i,t-1}$
$p_{k,t}=\eta p(z_t|X_t=x_k)\bar{p}_{k,t}$
$endfor$
$return~\{p_{k,t}\}$
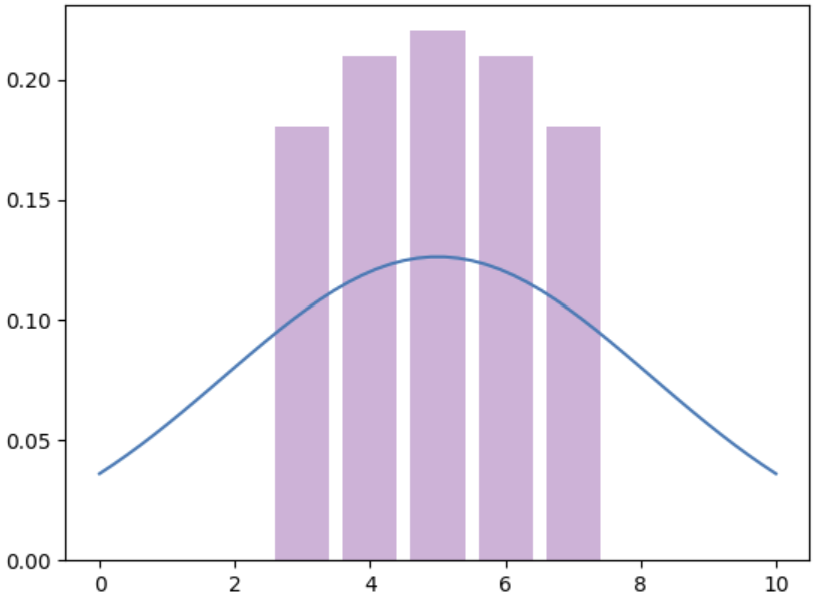
第3章习题2中,测量$z=5$,协方差$\sigma^2=10$的高斯噪声。因为本题中简化计算让$x$在$(-2,2)$之间,因此令$z=0$以便简化计算。
$p(z)=(2\pi\sigma^2)^{-\frac{1}{2}} exp\{-\frac{1}{2} \frac{(z-\mu)^2}{\sigma^2}\}
=\frac{e^{-\frac{1}{2}\frac{(z-5)^2}{10}}}{2\sqrt{5\pi}}$
import matplotlib.pyplot as plt
import numpy as np
import math
a = np.linspace(0, 10, 50)
pa = np.exp(-1/20*(a-5)*(a-5)) / np.sqrt(20*np.pi)
plt.plot(a,pa)
#采样
xx = np.linspace(3, 7, 5)
pxx = np.exp(-1/20*(xx-5)*(xx-5)) / np.sqrt(20*np.pi)
#归一化
pxx_sum = 1/np.sum(pxx)
pxx = np.dot(pxx_sum,pxx)
plt.bar(xx,pxx,color='purple',alpha=0.3)
print(pxx)
plt.show()测量的直方图如图所示,概率矩阵为:
| z | -2 | -1 | 0 | 1 | 2 |
| p(z) | 0.18034033 | 0.20952558 | 0.22026818 | 0.20952558 | 0.18034033 |
$p_{5} = \eta p(z|x)\bar{p}_5 $
ans = np.zeros(5)
psum = 0
for t in range(0,5):
ans[t]=pxx[t]*px[4][t]
psum = psum + ans[t]
for t in range(0,5):
ans[t] = ans[t]/psum
print(ans)| x | -2 | -1 | 0 | 1 | 2 |
| p(x) | 0.13511267 | 0.22694685 | 0.27588095 | 0.22694685 | 0.13511267 |
2.对本书第3章习题4研究的非线性进行直方图滤波实现。这里,研究的是一个具有3个状态变量并具有确定的状态转移的非线性系统。
$$\begin{pmatrix}
x^{'}\\ y^{'}\\ \theta^{'}
\end{pmatrix}=\begin{pmatrix}
x+cos\theta \\ y+sin\theta \\ \theta
\end{pmatrix}$$
初始状态估计如下:
$$\mu=\begin{pmatrix}
0&0&0
\end{pmatrix},
\Sigma = \begin{pmatrix}
0.01 & 0 & 0 \\
0 & 0.01 & 0 \\
0 & 0 & 10000
\end{pmatrix}$$
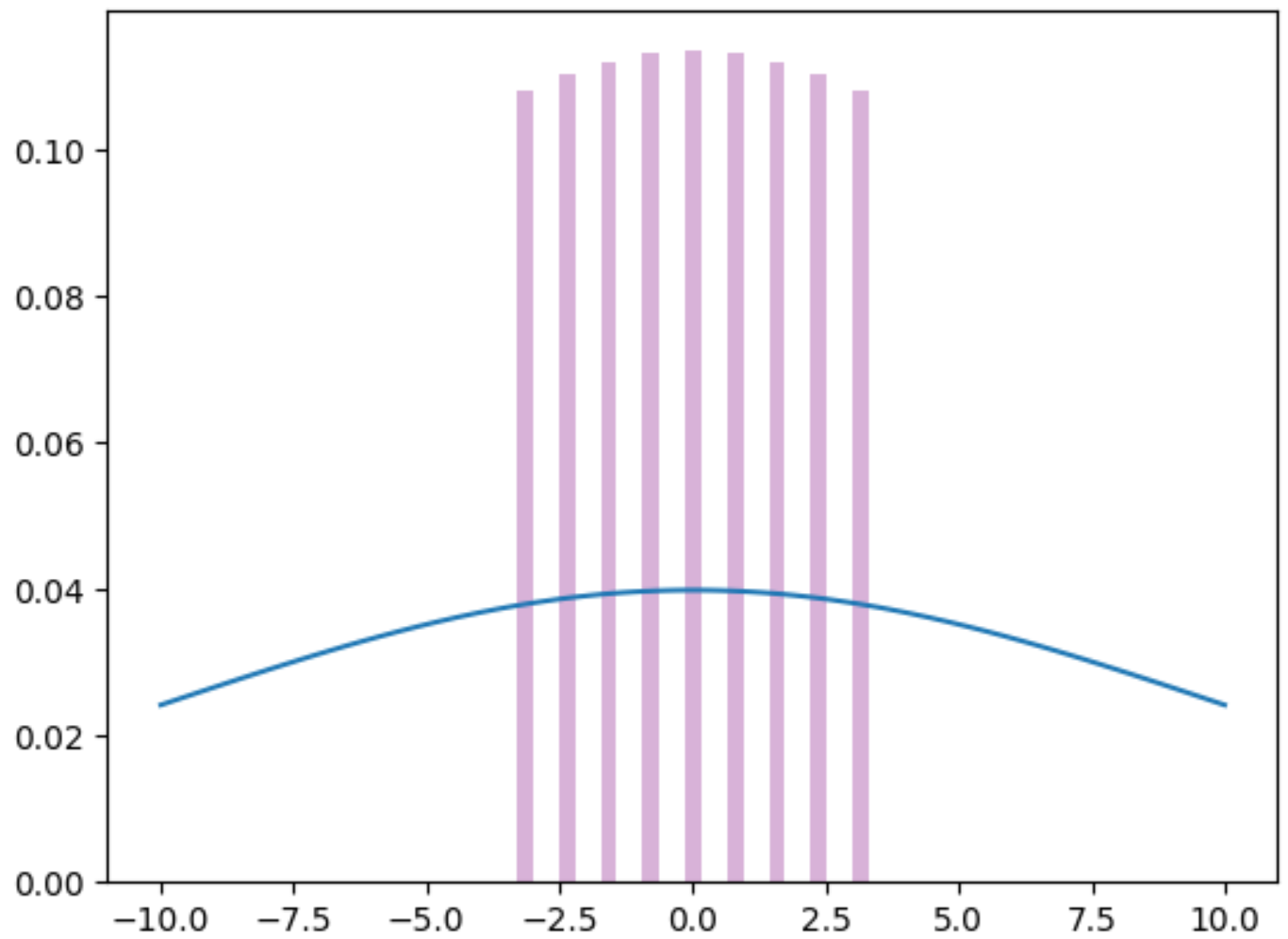
(1)为直方图滤波建立一个合适的初始估计,它反映高斯先验的状态信息。
import matplotlib.pyplot as plt
import numpy as np
import math
a = np.linspace(-5, 5, 100)
pa = np.exp(-1/0.2*(a)*(a)) / np.sqrt(0.2*np.pi)
plt.plot(a,pa)
#采样
xx = np.linspace(-1, 1, 5)
pxx = np.exp(-1/0.2*(xx)*(xx)) / np.sqrt(0.2*np.pi)
#归一化
pxx_sum = 1/np.sum(pxx)
pxx = np.dot(pxx_sum,pxx)
plt.bar(xx,pxx,color='purple',alpha=0.3,width=0.3)
print(pxx)
plt.show()
a = np.linspace(-10, 10, 100)
pa = np.exp(-1/200*(a)*(a)) / np.sqrt(200*np.pi)
plt.plot(a,pa)
#采样
xx = np.linspace(-np.pi, np.pi, 9)
pxx = np.exp(-1/200*(xx)*(xx)) / np.sqrt(200*np.pi)
#归一化
pxx_sum = 1/np.sum(pxx)
pxx = np.dot(pxx_sum,pxx)
plt.bar(xx,pxx,color='purple',alpha=0.3,width=0.3)
print(pxx)
plt.show()对于$x$和$y$:
| x,y | -1 | -0.5 | 0 | 0.5 | 1 |
|---|---|---|---|---|---|
| p | 0.00424709 | 0.18059087 | 0.63032408 | 0.18059087 | 0.00424709 |
对于$\theta$:
| $\theta$ | $-\pi$ | $-\frac{3}{4}\pi$ | $-\frac{1}{2}\pi$ | $-\frac{1}{4}\pi$ | 0 |
|---|---|---|---|---|---|
| p | 0.10794071 | 0.11029646 | 0.11201056 | 0.11305177 | 0.11340099 |
| $\theta$ | 0 | $\frac{1}{4}\pi$ | $\frac{1}{2}\pi$ | $\frac{3}{4}\pi$ | $\pi$ |
|---|---|---|---|---|---|
| p | 0.11340099 | 0.11305177 | 0.11201056 | 0.11029646 | 0.10794071 |
(2)实现直方图滤波并执行其预测步骤。
import matplotlib.pyplot as plt
import numpy as np
import math
pxy=np.array([0.00424709,0.18059087,0.63032408,0.18059087,0.00424709])
ptheta=np.array([0.10794071,0.11029646,0.11201056,0.11305177,0.11340099,0.11305177,0.11201056,0.11029646,0.10794071])
pxy1=np.zeros(5)
for i in range(0,5):
for j in range(0,5):
pxy1[i]=pxy1[i]+pxy[j]*ptheta[4+i-j]
#归一化
sum = 1/np.sum(pxy1)
pxy1 = np.dot(sum,pxy1)
print(pxy1)| x,y | -1 | -0.5 | 0 | 0.5 | 1 |
|---|---|---|---|---|---|
| p | 0.19877045 | 0.20061364 | 0.20123183 | 0.20061364 | 0.19877045 |
(3)将测量归并入估计。测量是机器人坐标$x$的有噪声映射,协方差为$Q=0.01$。执行这一步骤,计算出结果并绘图。
#采样
xx = np.linspace(-1, 1, 5)
pxx = np.exp(-1/0.2*(xx)*(xx)) / np.sqrt(0.2*np.pi)
#归一化
pxx_sum = 1/np.sum(pxx)
pxx = np.dot(pxx_sum,pxx)
print(pxx)
for i in range(0,5):
pxy1[i]=pxy1[i]*pxx[i]
#归一化
sum = 1/np.sum(pxy1)
pxy1 = np.dot(sum,pxy1)
print(pxy1)| x,y | -1 | -0.5 | 0 | 0.5 | 1 |
|---|---|---|---|---|---|
| p | 0.00420024 | 0.18025482 | 0.63108988 | 0.18025482 | 0.00420024 |
3.本章讨论了使用单一粒子的效果。粒子滤波时粒子数$M=2$时效果如何?能给出一个影响偏差的例子吗?如果有,是怎样的?
$
Algorithm~Partical\_filter(\chi_{t-1},u_t,z_t):$
$\bar{\chi}_t=\chi_t=\emptyset$
$for~m=1~toM~do$
$sample~x_t^{[m]}\sim p(x_t|u_t,x_{t-1}^{[m]})$
$w_t^{[m]}=p(z_t|x_t^{[m]})$
$\bar{\chi}_t=\bar{\chi}_t+<x_t^{[m]},w_t^{[m]}>$
$endfor$
$for~m=1~to~M~do$
$draw~i~with~probability~\propto~w_t^{[i]}$
$add~x_t^{i}~to~\chi_t$
$endfor$
$return~\chi_t$
如果粒子数为1:
$
Algorithm~Partical\_filter(\chi_{t-1},u_t,z_t):$
$\bar{\chi}_t=\chi_t=\emptyset$
$sample~x_t\sim p(x_t|u_t,x_{t-1})$
$w_t=p(z_t|x_t)$
$\bar{\chi}_t=\bar{\chi}_t+<x_t,w_t>$
$draw~1~with~probability~\propto~w_t$
$add~x_t~to~\chi_t$
$endfor$
$return~\chi_t$
在$M=1$这种极端情况下,粒子集中仅包含一个粒子,重采样步骤一定会采用该样本,而不管它的重要性因子为多大。因此测量概率对更新结果不起作用,换言之,它忽略了所有的测量。
当$M=2$,重要性因子可以影响重采样结果,因此测量被加入后验概率的估计中。但是,粒子数较小仍会造成误差较大。M越大越趋近于真实分布,M越小精度越低。
4.用粒子滤波而不是直方图对习题1进行实现,并绘制和讨论结果。
import numpy as np
import matplotlib.pyplot as plt
# 定义状态转移函数和观测函数
def f(x, dt):
return x # 假设状态转移函数为x
def h(x):
return x # 假设观测函数为x
# 初始化粒子集合和权重集合
N = 100 # 粒子数量
dt = 1 # 时间步长
x = 0 # 初始状态
particles = np.random.randn(N) # 初始粒子集合
weights = np.ones(N) / N # 初始权重集合
for t in range(5): # 迭代5次
# 状态转移
plt.scatter(particles,weights)
plt.show()
particles = f(particles, dt)
weights *= np.exp(-1/2 * (particles ** 2) / np.sqrt(2*np.pi))
# weights *= np.exp(-0.5 * ((z - particles) ** 2) / (0.1 ** 2))
weights /= np.sum(weights) # 归一化权重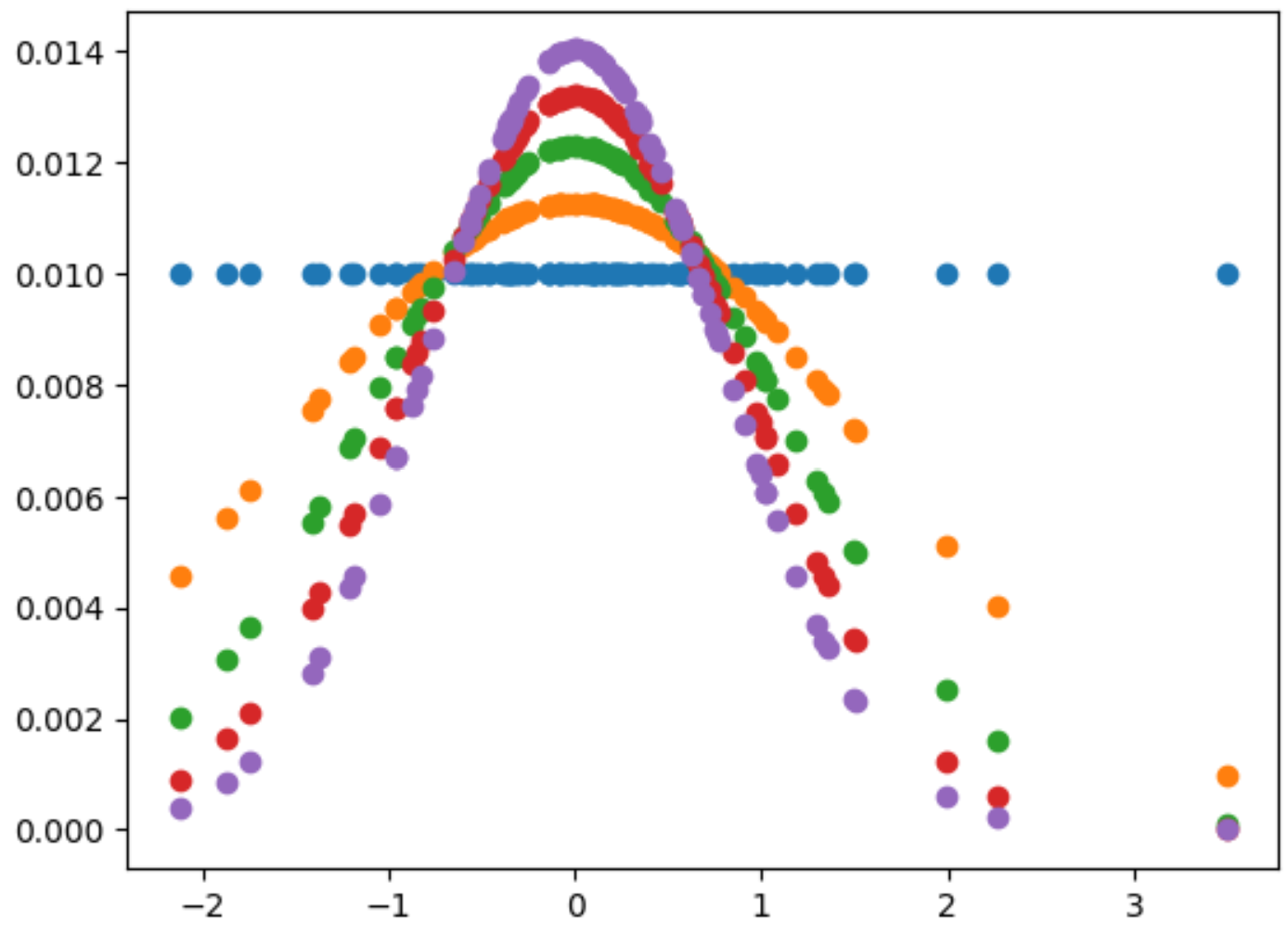
4.用粒子滤波而不是直方图对习题2进行实现,并绘制和讨论结果。研究不同粒子数对结果的影响。
import numpy as np
import matplotlib.pyplot as plt
# 定义状态转移函数和观测函数
def f(x, dt):
return x + dt * np.cos(np.pi*np.random.randn(100)) # 假设状态转移函数为x
def h(x):
return x # 假设观测函数为x
# 初始化粒子集合和权重集合
N = 100 # 粒子数量
dt = 1 # 时间步长
x = 0 # 初始状态
particles = np.random.randn(N) # 初始粒子集合
weights = np.ones(N) / N # 初始权重集合
# 高斯噪声
g = np.linspace(-1, 1, 100)
pg = np.exp(-1/0.2*(g)*(g)) / np.sqrt(0.2*np.pi)
for t in range(1): # 迭代1次
# 状态转移
plt.scatter(particles,weights)
particles = f(particles, dt)
weights *= np.exp(-1/20 * (particles ** 2) / np.sqrt(20*np.pi))
weights /= np.sum(weights) # 归一化权重
plt.scatter(particles,weights)
plt.show() 本题中,因为$\theta$的方差较大,因此在转移中忽略了$x$的方差。结果如图所示:

[...]第四章习题解答[...]
《雅各布教士历险记》喜剧片高清在线免费观看:https://www.jgz518.com/xingkong/16544.html
你的才华让人惊叹,请继续保持。 http://www.55baobei.com/6ZgCAFES8A.html
《猎杀时刻》连续剧高清在线免费观看:https://www.jgz518.com/xingkong/167038.html